technologies et sciences des ingénieurs
 s'identifier
s'identifier
 portail personnel ETNA
portail personnel ETNA
espace pédagogique > disciplines du second degré > STI > Archives du site > systèmes
du raisonnement jusqu'au code : algorithmie et Blockly@rduino
mis à jour le 15/11/2015
Partir de la situation problème, exprimer sa solution, la formaliser puis la convertir en instructions sans obstacle d'apprentissage d'un langage de programmation particulier, voilà le but de Blockly@rduino pour convertir des phrases en code Arduino.
mots clés : arduino programmation code blockly@rduino algorithme
Celle-ci se fait en langage naturel, et est donc accessible à tous les élèves, mais la vraie difficulté vient de sa traduction par étapes successives pour aboutir au langage machine.
La première étape est de faire écrire par les élèves l'attendu de leur système :
Puis leur demander de décomposer :
Tout le travail de l'enseignant est de faire progresser les détails dans le langage de l'élève et de l'amener vers des formulations de plus en plus proches du système mais surtout les plus simples possibles. il faut lui apprendre à décomposer un problème en sous-problèmes jusqu'à ce que chaque sous-problème soit dans une zone proximale de résolution de problème possible (pour paraphraser la zone proximale de développement explicitée par Lev Vigotsky). En effet, un problème trop complexe ne peut pas être résolu immédiatement, nous l'analysons pour le résoudre morceau par morceau. Voici ce qui peut être fait avec Blockly@rduino.
Utilisons un langage graphique : Blockly@rduino
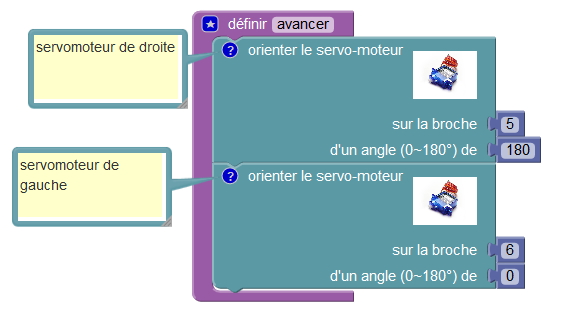
L'enseignant va définir avec l'élève, en fonction du système/robot :"c'est quoi concrètement 'avancer' ?".
Dans notre exemple, il s'agit d'un simple système avec 2 LDR (gauche & droite) devant pour mesurer la réflexion lumineuse sur la table et 2 servomoteurs à rotation continue pour la propulsion.
Avancer (à l'enseignant de choisir en fonction du niveau de l'élève s'il faut préparer avant cette partie, s'il faut donner les numéros de broche, s'il faut lui laisser comprendre le dispositif ou bien s'il faut lui laisser tout faire) :
Et ainsi de suite pour toutes les fonctions avancer - reculer - tourner - détecter.
Mais je vais détailler pour voir comment prendre en compte la mesure de la luminosité :
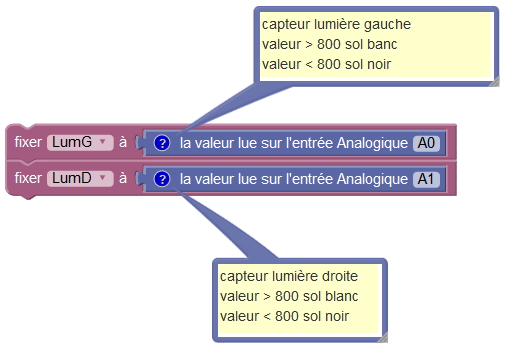
ATTENTION ! La mesure de la luminosité est la plus délicate, soumise à toutes les perturbations possibles, donc à déconseiller aux débutants !
Vous trouverez le programme complet en suivant ce lien : www.technologiescollege.fr/blockly@rduino/index.html
Du bloc au code
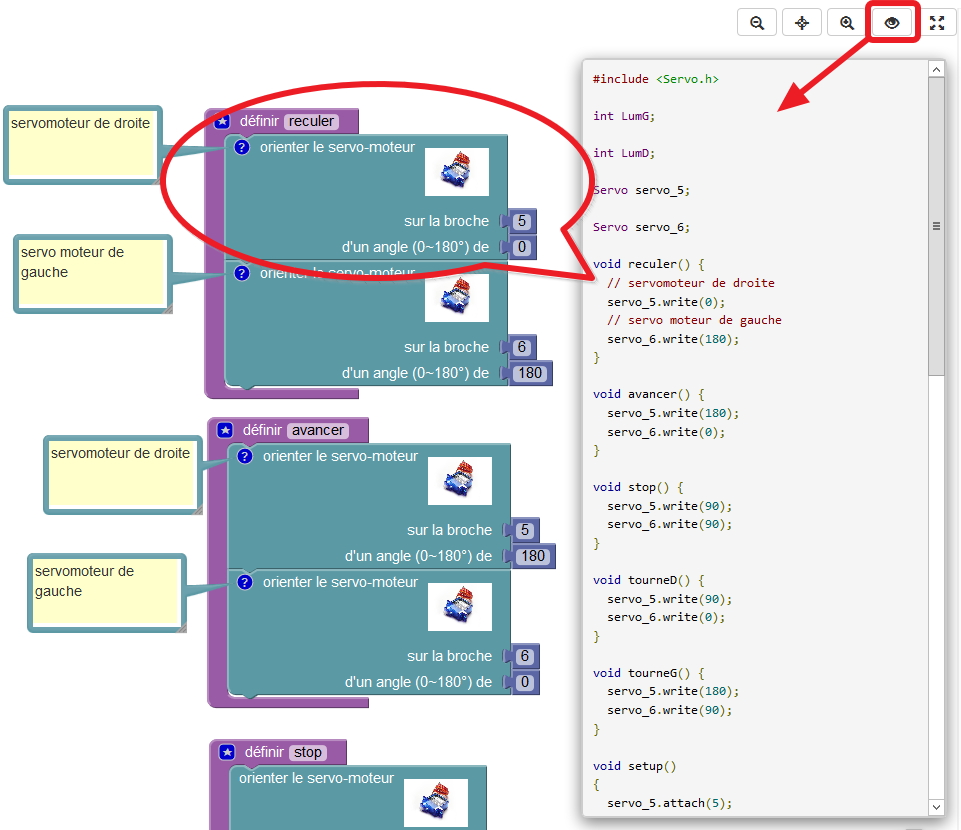
Pour savoir comment faire cela facilement, rendez-vous sur la page du tutoriel.
information(s) pédagogique(s)
niveau : tous niveaux, Cycle 3, --- COLLÈGE ---, 2nde
type pédagogique : démarche pédagogique
public visé : élève, enseignant
contexte d'usage : non précisé
référence aux programmes :
Décomposer le problème posé en sous-problèmes afin de structurer un programme de commande.
Écrire, mettre au point (tester, corriger) et exécuter un programme commandant un système réel et vérifier le comportement attendu.
Écrire un programme dans lequel des actions sont déclenchées par des événements extérieurs.
Plan du site
- Accueil
- Informations
- Présentation de nos formations
- Technologie collège
- Bac STI2D
- Sciences de l'Ingénieur
- BTS
- CPGE
- Se former
- Vos ressources
- Archives du site

 ressources pédagogiques
ressources pédagogiquestechnologies et sciences des ingénieurs - Rectorat de l'Académie de Nantes